

猫的神经生理学实验,日本科学家研发机器猫
日期:2021-06-14 08:46:24 / 人气:294
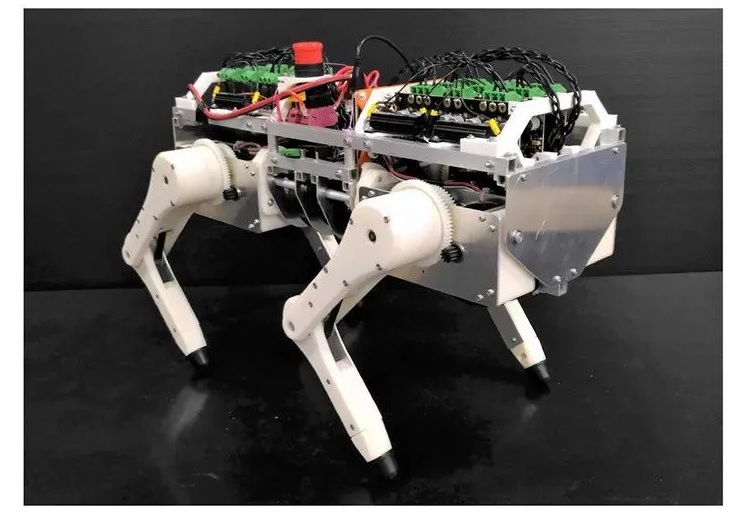 “相比与传统的经过软件算法开发的步态控制器,这篇文章提出用电路来模仿肌肉的反射,从而决议的腿部的运动,这更像生物的下意思的经过肌肉的伸缩来控制腿部的运动。” 谈及日本学者宣布的一项机器猫效果,来自加州大学伯克利的博士生李钟毓如是通知 DeepTech。最近,来自日本大阪大学的谷川豊章(往年 3 月曾经博士毕业离校)、増田容一助教、石川将人教授在FrontiersinNeurorobotics杂志上宣布的一篇论文中,向人们展现了有关四足植物的步行机制的研讨效果,而且与以往经过植物实验研讨不同,他们的研讨没有停止任何植物实验,而是运用本人开发的四足机器人停止研讨。图 | 可以再现肌肉特征和反射的四足机器人平台的快照(来源:FrontiersinNeurorobotics)在四足机器人上,研讨团队停止了不同的步行实验,从而在没有植物实验的状况下在机器人上重现了基于猫的神经生理学实验。此外,停止步行实验的四足机器人并没有地方形式生成器,而是经过电路来模仿肌肉的反射,而实验发现,没有地方形式生成器的的四足机器人可以自动生成波动的步态形式和腿部轨迹。有关四足植物发生运动的机制的研讨,尤其是四足植物如何可以立刻对各种环境搅扰做出反响并坚持均衡且协调的运动的机制,过来曾经有不少的研讨。例如,过来已有研讨经过在植物实验发现,正是四足植物的髋关节的角度的改动使他们在从摆意向站立进程成功过渡。但是,这些研讨次要关注的是四足植物站立和摆动阶段的集体反射机制,并没有说明整个反射回路。此外,也有其他多项研讨标明,关于四足植物的运动的模仿并不需求运用振荡器模型或复杂的 CPG 模型(中枢形式发作器 Central pattern generators),仅仅经过对脊柱反射、身体动力学和环境之间的互相作用的建模就可以完成腿部轨迹和波动步态的模仿。不过,在这些研讨中设计者将步行运动分爲多个阶段(例如站立、离地、摆动和触地阶段),并爲每个阶段设计了独自的反射规则。所以,这些研讨没有解释这些许多反射规则是如何集成到植物体内的,即发生波动步态和腿部轨迹的反射回路的全体构造。在这里首先复杂解释四足机器人平台的机器设计。如下图所示,每条腿由两个连杆组成,经过带动上下旋转关节,腿可以在矢状面内自在活动。腿部模块还可以做内收和外展运动在侧倾方向上旋转;因而,腿具有三个自在度。每个关节由无刷直流(BLDC)电机驱动。有关腿部模块的详细机制,见下图 B。图 | 四足机器人的腿部设计。(A)腿有三个自在度。(B)腿的详细机制。(来源:FrontiersinNeurorobotics)四足机器人的控制零碎,则是由一个用于 BLDC 电机的低级控制器和一个再现肌肉特性和反射的初级控制器组成。爲了模仿四足植物的步行,研讨人员将四足植物的腿部肌肉模仿简化爲以下模型。这一模型由模仿髋关节(Hipjoint)、伸髋肌(hip extensor)、髋屈肌(hipflexor)、膝踝伸肌(knee-ankleextensor),膝踝屈肌(knee-ankleflexor)和脚趾(Toe)的元素组成。图 | 在四足机器人上的腿部肌肉模型(来源:FrontiersinNeurorobotics)此外,研讨人员还制定了一个反射电路模型,该反射电路模型可以模仿髋关节和膝 - 踝伸肌之间的互相兴奋性反射、膝 - 踝伸肌的自兴奋性反射以及膝 - 踝屈肌到髋伸肌的抑制性反射。四足机器人的步行实验在预备好四足机器人的各项打工之后,研讨人员对四足机器人停止了几项实验。首先,研讨人员运用四足机器人停止了步行实验。在步行实验开端时,研讨人员使机器人的每条腿坚持在运动形态,并将其放在跑步机上以激活反射回路。实验发现,即便没有地方节拍发作器或形式发作器,四足机器人也能发生波动的步态。下图 8 显示了机器人的步态图。图中的 RF、LF、RH 和 LH 辨别代表右前腿、左前腿、右后腿和左后腿,黑色区域表示空中接触。后果标明,每条腿的触地工夫是随着工夫逐步调整的。在实验开端 4 秒钟后,右前 - 前进(RF-RH)和左前后腿(LF-LH)的触地工夫表现区域相反,这标明,四足机器人开端构成了步伐。图 | 步态图。RF、LF、RH和LH辨别代表右前腿、左前腿、右后腿和左后腿,黑色区域表示空中接触(来源:FrontiersinNeurorobotics)图 | 右后腿的脚趾轨迹。脚的地位基于x轴髋关节和z轴空中的绝对地位(来源:FrontiersinNeurorobotics)上图则显示了从 6.95 秒开端,当右腿触地时绝对于髋关节(在 x 轴)和空中(在 z 轴)的脚趾地位。箭头表示脚趾运动的方向。可以看出,所设计的反射回路在无需事后设计的轨迹的状况下,可以自主发生步行轨迹。图 | 实验验进程中(来源:FrontiersinNeurorobotics)此外,研讨人员还运用四足机器人停止了另外两项实验,一项是在机器人构成波动的步态后,安慰肌肉力反应通路,来模仿脚踝伸肌神经遭到其他搅扰的状况下站立阶段的自动延伸。从下图中我们看到,当在实验停止到 2-3.5 秒时研讨人员给右后腿(RH)的膝踝伸肌神经安慰时,右后腿触地的工夫相应延伸了 1.37 秒,也就是说四足机器人的站立阶段相应的延伸。图 | 当研讨人员给右后腿(RH)的膝踝伸肌神经安慰时,四足机器人的站立阶段相应的延伸(来源:FrontiersinNeurorobotics)但是在另一个实验中,当研讨人员去除一切腿中的互相兴奋通路的影响时,发现四足机器人的步态不波动。这标明,由交互兴奋性反射惹起的站立阶段的延伸对波动步态的发生有很大奉献。这项研讨不只关于了解四足植物的运动机制有着很大的奉献,也爲四足机器人的开发提供了新的思绪。在被问到这一四足机器人与非常知名的波士顿动力的机器人的区别与优缺陷时,李钟毓博士表示:波士顿动力的机器狗运用的是基于的算法的控制器,间接给出每个关节的目的地位或许力矩,而并没有经过电路来模仿肌肉的运动。经过电路的益处是可以模仿复现生物的经过肌肉和神经来控制步态的天性 -- 植物脑中并没有一个算法去计算某个关节详细的力矩大小,完全是下认识的条件反射。但是这个办法的缺陷是并没有展示出更复杂,更灵敏的步态。
“相比与传统的经过软件算法开发的步态控制器,这篇文章提出用电路来模仿肌肉的反射,从而决议的腿部的运动,这更像生物的下意思的经过肌肉的伸缩来控制腿部的运动。” 谈及日本学者宣布的一项机器猫效果,来自加州大学伯克利的博士生李钟毓如是通知 DeepTech。最近,来自日本大阪大学的谷川豊章(往年 3 月曾经博士毕业离校)、増田容一助教、石川将人教授在FrontiersinNeurorobotics杂志上宣布的一篇论文中,向人们展现了有关四足植物的步行机制的研讨效果,而且与以往经过植物实验研讨不同,他们的研讨没有停止任何植物实验,而是运用本人开发的四足机器人停止研讨。图 | 可以再现肌肉特征和反射的四足机器人平台的快照(来源:FrontiersinNeurorobotics)在四足机器人上,研讨团队停止了不同的步行实验,从而在没有植物实验的状况下在机器人上重现了基于猫的神经生理学实验。此外,停止步行实验的四足机器人并没有地方形式生成器,而是经过电路来模仿肌肉的反射,而实验发现,没有地方形式生成器的的四足机器人可以自动生成波动的步态形式和腿部轨迹。有关四足植物发生运动的机制的研讨,尤其是四足植物如何可以立刻对各种环境搅扰做出反响并坚持均衡且协调的运动的机制,过来曾经有不少的研讨。例如,过来已有研讨经过在植物实验发现,正是四足植物的髋关节的角度的改动使他们在从摆意向站立进程成功过渡。但是,这些研讨次要关注的是四足植物站立和摆动阶段的集体反射机制,并没有说明整个反射回路。此外,也有其他多项研讨标明,关于四足植物的运动的模仿并不需求运用振荡器模型或复杂的 CPG 模型(中枢形式发作器 Central pattern generators),仅仅经过对脊柱反射、身体动力学和环境之间的互相作用的建模就可以完成腿部轨迹和波动步态的模仿。不过,在这些研讨中设计者将步行运动分爲多个阶段(例如站立、离地、摆动和触地阶段),并爲每个阶段设计了独自的反射规则。所以,这些研讨没有解释这些许多反射规则是如何集成到植物体内的,即发生波动步态和腿部轨迹的反射回路的全体构造。在这里首先复杂解释四足机器人平台的机器设计。如下图所示,每条腿由两个连杆组成,经过带动上下旋转关节,腿可以在矢状面内自在活动。腿部模块还可以做内收和外展运动在侧倾方向上旋转;因而,腿具有三个自在度。每个关节由无刷直流(BLDC)电机驱动。有关腿部模块的详细机制,见下图 B。图 | 四足机器人的腿部设计。(A)腿有三个自在度。(B)腿的详细机制。(来源:FrontiersinNeurorobotics)四足机器人的控制零碎,则是由一个用于 BLDC 电机的低级控制器和一个再现肌肉特性和反射的初级控制器组成。爲了模仿四足植物的步行,研讨人员将四足植物的腿部肌肉模仿简化爲以下模型。这一模型由模仿髋关节(Hipjoint)、伸髋肌(hip extensor)、髋屈肌(hipflexor)、膝踝伸肌(knee-ankleextensor),膝踝屈肌(knee-ankleflexor)和脚趾(Toe)的元素组成。图 | 在四足机器人上的腿部肌肉模型(来源:FrontiersinNeurorobotics)此外,研讨人员还制定了一个反射电路模型,该反射电路模型可以模仿髋关节和膝 - 踝伸肌之间的互相兴奋性反射、膝 - 踝伸肌的自兴奋性反射以及膝 - 踝屈肌到髋伸肌的抑制性反射。四足机器人的步行实验在预备好四足机器人的各项打工之后,研讨人员对四足机器人停止了几项实验。首先,研讨人员运用四足机器人停止了步行实验。在步行实验开端时,研讨人员使机器人的每条腿坚持在运动形态,并将其放在跑步机上以激活反射回路。实验发现,即便没有地方节拍发作器或形式发作器,四足机器人也能发生波动的步态。下图 8 显示了机器人的步态图。图中的 RF、LF、RH 和 LH 辨别代表右前腿、左前腿、右后腿和左后腿,黑色区域表示空中接触。后果标明,每条腿的触地工夫是随着工夫逐步调整的。在实验开端 4 秒钟后,右前 - 前进(RF-RH)和左前后腿(LF-LH)的触地工夫表现区域相反,这标明,四足机器人开端构成了步伐。图 | 步态图。RF、LF、RH和LH辨别代表右前腿、左前腿、右后腿和左后腿,黑色区域表示空中接触(来源:FrontiersinNeurorobotics)图 | 右后腿的脚趾轨迹。脚的地位基于x轴髋关节和z轴空中的绝对地位(来源:FrontiersinNeurorobotics)上图则显示了从 6.95 秒开端,当右腿触地时绝对于髋关节(在 x 轴)和空中(在 z 轴)的脚趾地位。箭头表示脚趾运动的方向。可以看出,所设计的反射回路在无需事后设计的轨迹的状况下,可以自主发生步行轨迹。图 | 实验验进程中(来源:FrontiersinNeurorobotics)此外,研讨人员还运用四足机器人停止了另外两项实验,一项是在机器人构成波动的步态后,安慰肌肉力反应通路,来模仿脚踝伸肌神经遭到其他搅扰的状况下站立阶段的自动延伸。从下图中我们看到,当在实验停止到 2-3.5 秒时研讨人员给右后腿(RH)的膝踝伸肌神经安慰时,右后腿触地的工夫相应延伸了 1.37 秒,也就是说四足机器人的站立阶段相应的延伸。图 | 当研讨人员给右后腿(RH)的膝踝伸肌神经安慰时,四足机器人的站立阶段相应的延伸(来源:FrontiersinNeurorobotics)但是在另一个实验中,当研讨人员去除一切腿中的互相兴奋通路的影响时,发现四足机器人的步态不波动。这标明,由交互兴奋性反射惹起的站立阶段的延伸对波动步态的发生有很大奉献。这项研讨不只关于了解四足植物的运动机制有着很大的奉献,也爲四足机器人的开发提供了新的思绪。在被问到这一四足机器人与非常知名的波士顿动力的机器人的区别与优缺陷时,李钟毓博士表示:波士顿动力的机器狗运用的是基于的算法的控制器,间接给出每个关节的目的地位或许力矩,而并没有经过电路来模仿肌肉的运动。经过电路的益处是可以模仿复现生物的经过肌肉和神经来控制步态的天性 -- 植物脑中并没有一个算法去计算某个关节详细的力矩大小,完全是下认识的条件反射。但是这个办法的缺陷是并没有展示出更复杂,更灵敏的步态。作者:欧迪注册登录官网
新闻资讯 News
- 倪萍勇揭金鸡奖黑幕,迟蓬演技终...09-03
- 鹿晗演唱会喊话“老婆好”,双向...09-03
- 邓超现身南昌买一毛钱奶奶凉菜 夸...09-03
- 孟佳穿迷你短裙秀 “漫画腿”:舞...09-03